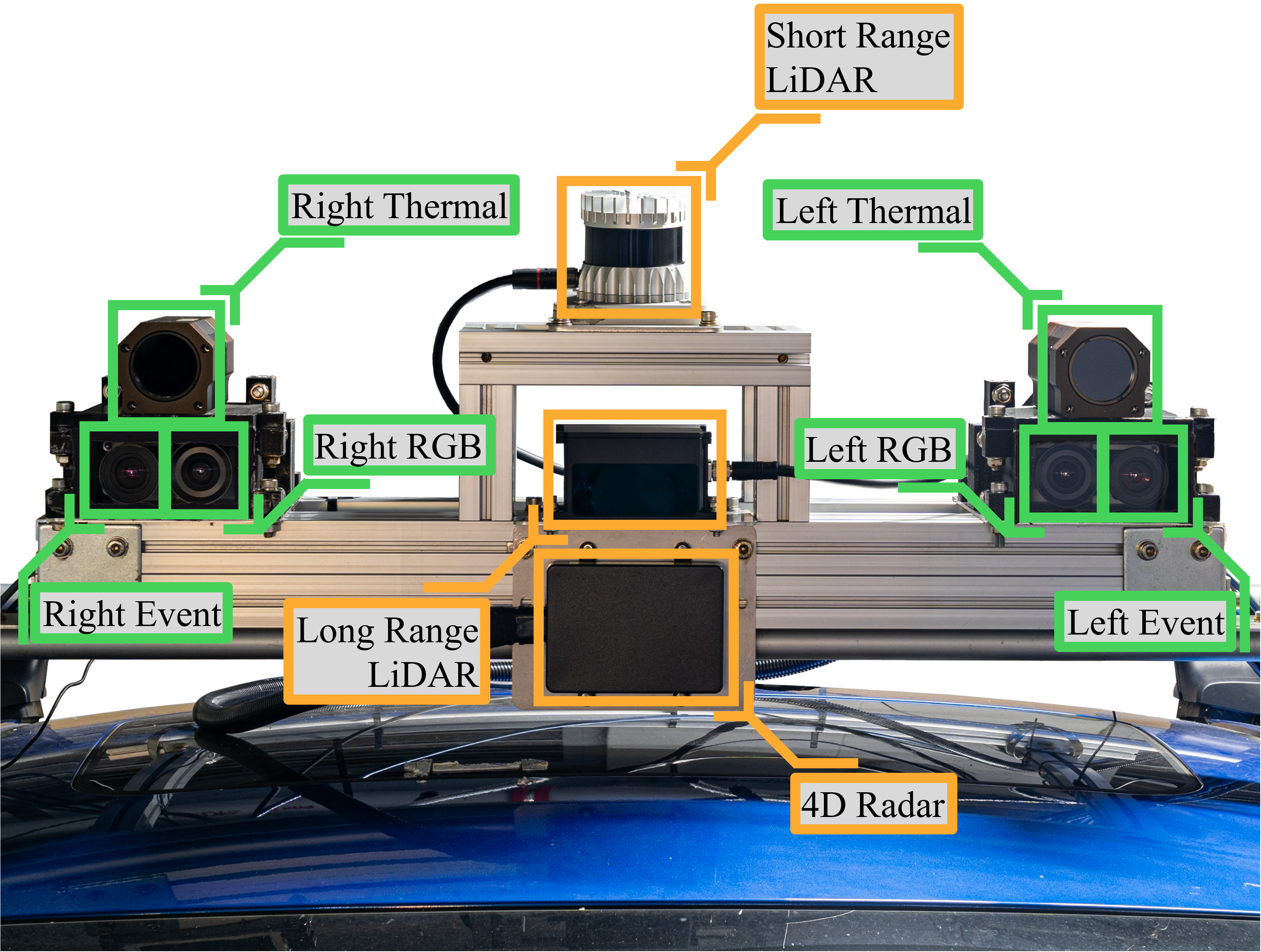
Sensor Suite
| 2D Sensors | Model Name | Specification | FoV | FPS |
|---|---|---|---|---|
| RGB | 2 × BFS-U3-51S5C | 2448 × 2048 | 82.2° × 66.5° | 10 |
| Event | 2 × Prophesee EVK4 | 1280 × 720 | 76.7° × 65.5° | >10k |
| Thermal | 2 × FLIR A65 | 640 × 512 | 90° × 69° | 30 |
| 3D Sensors | Model Name | Specification | FoV | FPS |
| 4D Radar | RETINA-4FN | 100m | 100° × 24° | 20 |
| Long-range LiDAR | Livox HAP | 150m | 120° × 25° | 10 |
| Short-range LiDAR | os0-128 | 100m | 360° × 90° | 20 |
| GPS/IMU | Microstrain 3DM-GX5-45 | N/A | N/A | 10/100 |