Yuhwan Jeong

Hello! I am a third-year Ph.D. student in VILAB led by Prof. Kuk-Jin Yoon in the Department of Mechanical Engineering at KAIST. I work on Generative Models and Optical Flow. I aim to bridge the gap between high-fidelity scene generation and robust motion estimation, enabling models to adapt quickly to diverse and dynamic environments. Accuracy and Generalization are my core goals, and I benchmark my methods rigorously using both established datasets and real-world conditions.
I enjoy open discussions on research and practice, and I am always open to exchanging ideas on Generative Models, Optical Flow, and broader computer vision topics. Please feel free to get in touch by email or on LinkedIn.
News
| Jun 19, 2026 | One paper accepted at ECCV 2026! |
|---|---|
| Apr 08, 2026 | Our paper “Event-based Motion Deblurring with Unpaired Data” has been selected as a Highlight at CVPR 2026! |
| Feb 27, 2026 | Two papers accepted at CVPR 2026! |
| Feb 20, 2026 | Personal webpage is now live! |
Education
2024.03 – now · Ph.D., Mechanical Engineering, KAIST
2022.03 – 2024.02 · M.S., Mechanical Engineering, KAIST
2017.03 – 2022.02 · B.S., Mechanical Engineering, KAIST
Publications
- Zero-Shot Coordination under Partial Observability by Predicting Intention of PartnerIn Pre-print, 2026
- Counterfactual Discovery of Motion-Effect Circuits in Video Diffusion TransformersIn Pre-print, 2026
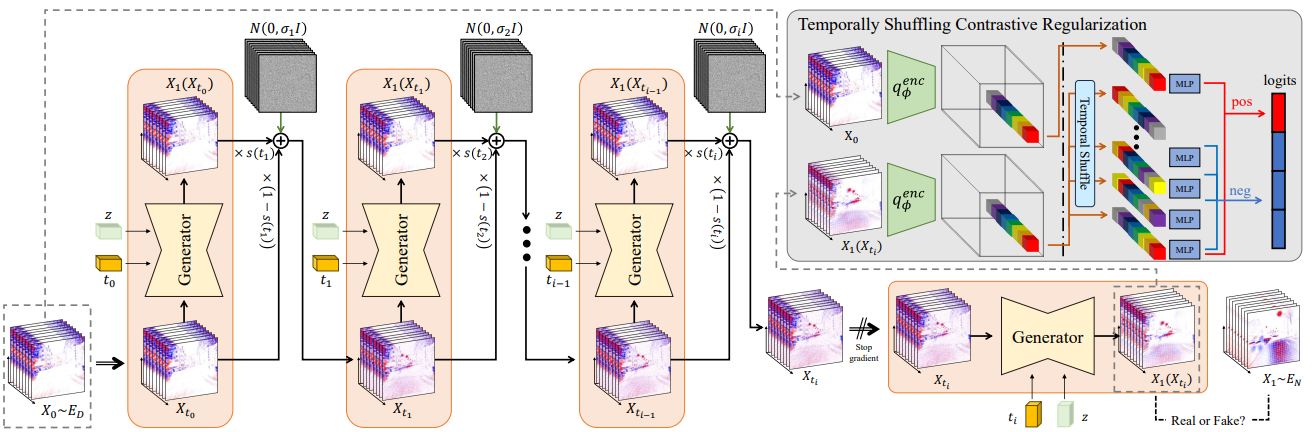
- Controllable Event-Guided Diffusion for Motion Blur Synthesis with Additional Blur-Free DataIn Pre-print, 2026
-
 FrozenDrive: Zero-Shot Text-Guided Driving Scene Generation and Data Augmentation with Parameter-Free Frozen Diffusion ModelIn European Conference on Computer Vision, 2026
FrozenDrive: Zero-Shot Text-Guided Driving Scene Generation and Data Augmentation with Parameter-Free Frozen Diffusion ModelIn European Conference on Computer Vision, 2026 -
 DSERT-RoLL: Robust Multi-Modal Perception for Diverse Driving Conditions with Stereo Event-RGB-Thermal Cameras, 4D Radar, and Dual-LiDARIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2026
DSERT-RoLL: Robust Multi-Modal Perception for Diverse Driving Conditions with Stereo Event-RGB-Thermal Cameras, 4D Radar, and Dual-LiDARIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2026 -
 Event-based Motion Deblurring with Unpaired DataIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2026
Event-based Motion Deblurring with Unpaired DataIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2026 -
 Robust Adverse Weather Removal via Spectral-based Spatial GroupingIn Proceedings of the IEEE/CVF International Conference on Computer Vision, 2025
Robust Adverse Weather Removal via Spectral-based Spatial GroupingIn Proceedings of the IEEE/CVF International Conference on Computer Vision, 2025 -
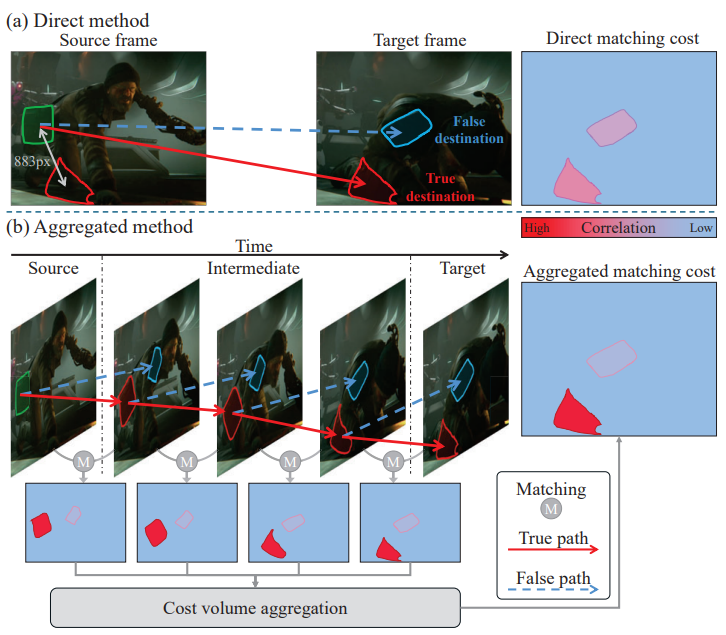 Learning Large Motion Estimation from Intermediate Representations with a High-Resolution Optical Flow Dataset Featuring Long-Range Dynamic MotionIn Proceedings of the IEEE/CVF International Conference on Computer Vision, 2025
Learning Large Motion Estimation from Intermediate Representations with a High-Resolution Optical Flow Dataset Featuring Long-Range Dynamic MotionIn Proceedings of the IEEE/CVF International Conference on Computer Vision, 2025 -
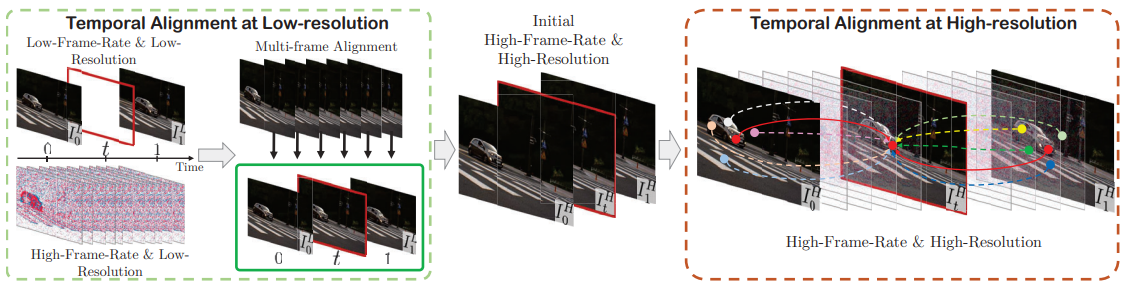 Unifying Low-Resolution and High-Resolution Alignment by Event Cameras for Space-Time Video Super-ResolutionIn 2025 IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2025
Unifying Low-Resolution and High-Resolution Alignment by Event Cameras for Space-Time Video Super-ResolutionIn 2025 IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2025 -
 A benchmark dataset for event-guided human pose estimation and tracking in extreme conditionsAdvances in Neural Information Processing Systems, 2024
A benchmark dataset for event-guided human pose estimation and tracking in extreme conditionsAdvances in Neural Information Processing Systems, 2024 -
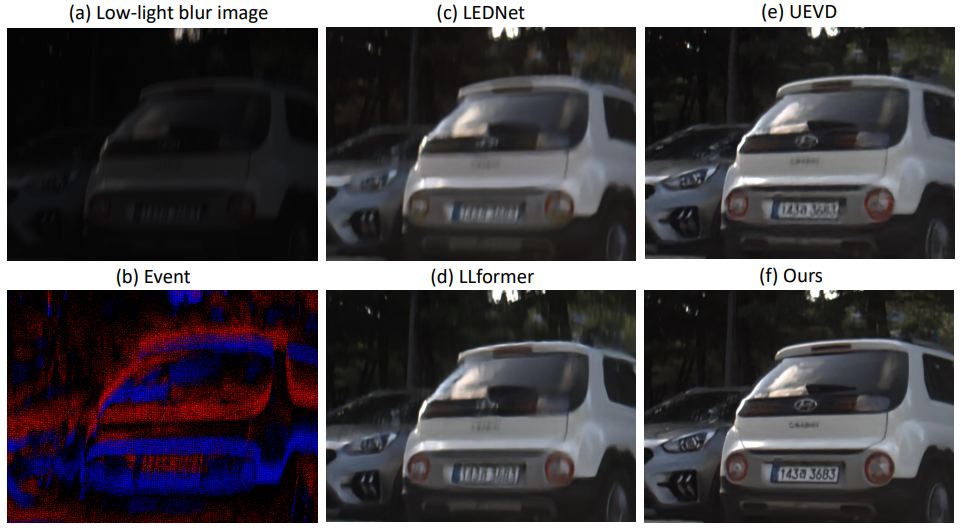 Towards real-world event-guided low-light video enhancement and deblurringIn European Conference on Computer Vision, 2024
Towards real-world event-guided low-light video enhancement and deblurringIn European Conference on Computer Vision, 2024 -
 Towards robust event-based networks for nighttime via unpaired day-to-night event translationIn European Conference on Computer Vision, 2024
Towards robust event-based networks for nighttime via unpaired day-to-night event translationIn European Conference on Computer Vision, 2024 -
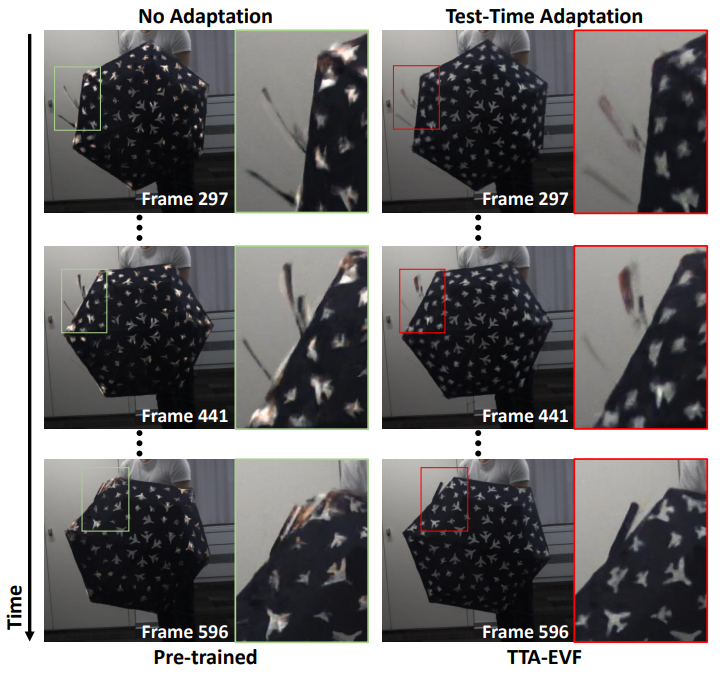 TTA-EVF: test-time adaptation for event-based video frame interpolation via reliable pixel and sample estimationIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024
TTA-EVF: test-time adaptation for event-based video frame interpolation via reliable pixel and sample estimationIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024 -
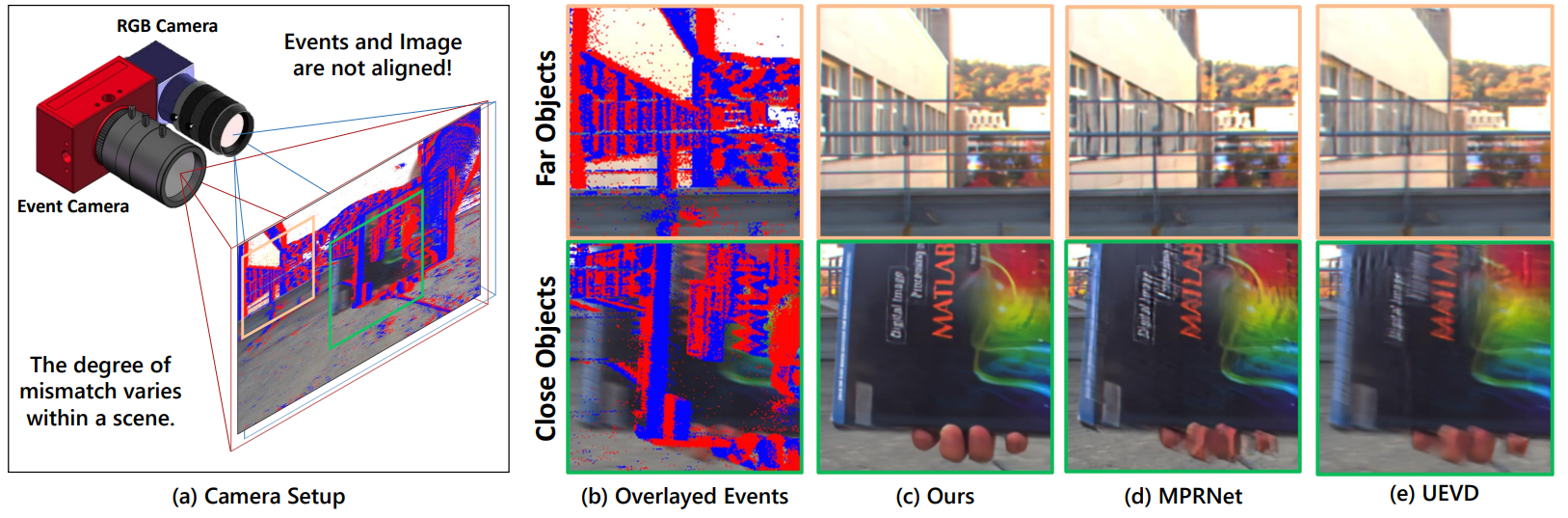 Non-coaxial event-guided motion deblurring with spatial alignmentIn Proceedings of the IEEE/CVF International Conference on Computer Vision, 2023
Non-coaxial event-guided motion deblurring with spatial alignmentIn Proceedings of the IEEE/CVF International Conference on Computer Vision, 2023
Projects
- Computer Vision Research Based on Multimodal Cameras for Robust Autonomous Driving
- Development of a Humanoid Robot Pilot Based on Natural Language Processing Knowledge Base
- Future Mobility Testbed Development through IT, AI, and Robotics
- Development of Data Augmentation and Sensor Fusion Technologies for Robust Autonomous Driving